For observation of a random phenomenon, the probability of a particular outcome is the proportion of times that outcome would occur in an indefinitely long sequence of like observations, under the same conditions.
- complement 补
- intersection 交 (and)
- union 并 (or)
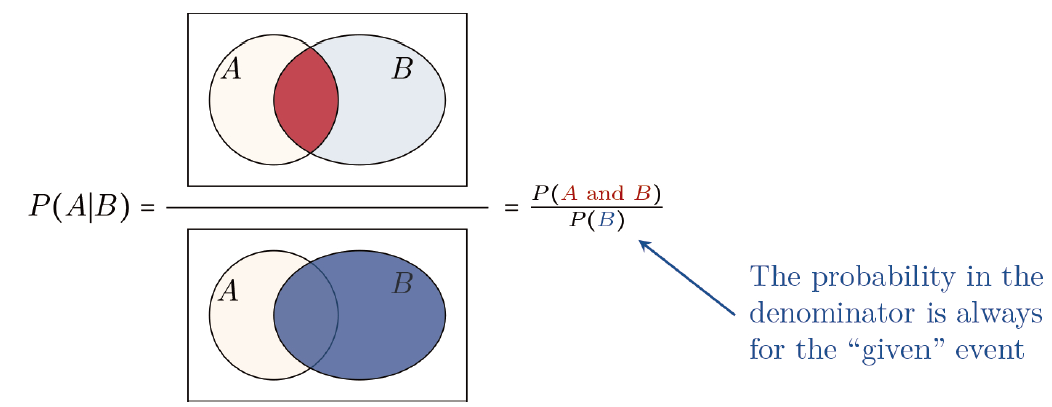
- A probability of event $ A $, given event $ B $ occurred, is called conditional probability. It is denoted by $ P(A \mid B) $.
Placing P(B) in the denominator corresponds to conditioning on (i.e., restricting to) the sample points in B, and it requires P(B)>0. We place P(A B) in the numerator to find the fraction of event $ B $ that is also in event $ A $ (see Figure 2.3).
$$
P(A \mid B)=\frac{P(A B)}{P(B)}
$$ - Random variable: For a random phenomenon, a random variable is a function that assigns a numerical value to each point in the sample space. Random variables can be discrete or continuous. We use
- upper-case letters to represent random variables,
- with lower-case versions for particular possible values.
- Probability distribution: A probability distribution lists the possible outcomes for a random variable and their probabilities.
- Probability density function for continuous random variables (
pdf) - probability mass function for discrete random variable (
pmf) - Cumulative distribution function (
cdf)
The probability $ P(Y \leq y) $ that a random variable $ Y $ takes value $ \leq y $ is called a cumulative probability. The cumulative distribution function is $ F(y) = P(Y \leq y) $, for all real numbers $ y $.
By convention, we denote a
pdforpmfby lower-case $ f $ and ac d fby upper-case $ F $.$$
F(y) = P(Y \leq y) = \int_{-\infty}^{y} f(u) d u .
$$Because we obtain the
cdffor a continuous random variable by integrating thepdf, we can obtain thepdffrom thecdfby differentiating it. - Probability density function for continuous random variables (
- Expected value (mean, expectation) of a discrete random variable:
-
$$
E(Y)=\sum_{y} y f(y),
$$ - For a discrete random variable $ Y $ with
pmf$ f(y) $ and $ E(Y)=\mu $, the variance is denoted by $ \sigma^{2} $ and defined to be: -
$$
\sigma^{2}=E(Y-\mu)^{2}=\sum_{y}(y-\mu)^{2} f(y),
$$The variance of a discrete (or continuous) random variable has an alternative formula, resulting from the derivation:
$$
\begin{aligned}
\sigma^{2} & =E(Y-\mu)^{2}=\sum_{y}(y-\mu)^{2} f(y) \\
& =\sum_{y}\left(y^{2}-2 y \mu+\mu^{2}\right) f(y) \\
& = \sum_{y} y^{2} f(y)-2 \mu \sum_{y} y f(y)+\mu^{2} \sum_{y} f(y) \\
& =E\left(Y^{2}\right)-2 \mu E(Y)+\mu^{2} \\
& =E\left(Y^{2}\right)-\mu^{2}
\end{aligned}
$$$$
\operatorname{var}(Y)=\sigma^{2}=E\left(Y^{2}\right)-\mu^{2}
$$ - The standard deviation of a discrete random variable, denoted by $ \sigma $, is the positive square root of the variance.
- Expected value and variability of a continuous random variable for a continuous random variable $ Y $ with probability density function $ f(y) $,
-
$$
E(Y)=\mu=\int_{y} y f(y) d y , \\
\text { variance } \sigma^{2}=E(Y-\mu)^{2}=\int_{y}(y-\mu)^{2} f(y) d y,
$$and the standard deviation \sigma is the positive square root of the variance.
Bayes’ theorem
For any two events $ A $ and $ B $ in a sample space with $ P(A)>0 $,
$$
P(B \mid A)=\frac{P(A \mid B) P(B)}{P(A \mid B) P(B)+P\left(A \mid B^{c}\right) P\left(B^{c}\right)}
$$
Generally, for two events $ A $ and $ B $, the multiplicative law of probability states that:
$$
P(A B)=P(A \mid B) P(B)=P(B \mid A) P(A) .
$$
Sometimes $ A $ and $ B $ are independent events, in the sense that $ P(A \mid B)=P(A) $, that is, whether $ A $ occurs does not depend on whether $ B $ occurs. In that case, the previous rule simplifies:
$$
P(A B)=P(A) P(B) .
$$
Comments NOTHING